CarSimパラメータの最適化と応答評価の自動化を実現
OptiYは、実験計画の生成とモデルの反復実行により解析を自動化します。CarSimモデルにおける感度解析や高度なパラメータースタディを可能とし、モデルベース開発を強力に支援します。
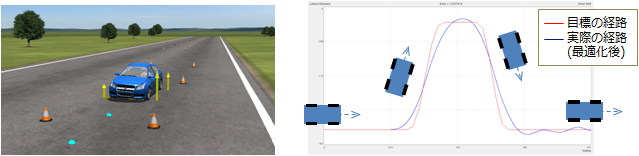
レーンチェンジを行う時のドライバーモデルの最適化
下記のサンプルでは、レーンチェンジを行った時のDriverControlのパラメータを最適化しています。
グラフの横軸は軌道距離、縦軸は横方向距離を示しており、軌跡が走行経路を示しています。
目標の走行経路(赤線)に対して実際の走行経路(青線)をできるだけ近づけるために、求められるドライバーモデルのパラメータの最適化をしています。
パラメータ
- Max. steering wheel angle rate:最大操舵角
- Max. steering wheel angle rate:最大操舵速度
- Driver Preview time:予見にかかる時間
- Driver Time Lag:反応するまでの時間
- Low-Speed dynamic limit:低速認識へ切替る速度
目的関数
- 走行経路(軌道距離ー横方向距離)
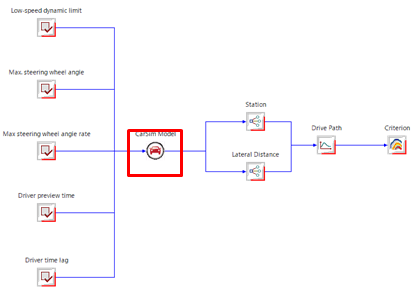
OptiYワークフロー
*.simファイルを介してパラスタを実施します。
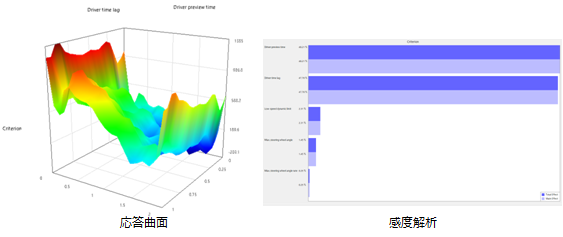
応答曲面を利用した感度解析、最適化
感度解析からDriver Preview timeとDriver Time Lagの感度が特に高い結果を得られました。